自然界中普遍存在着可编程的“材料”,它们通过内嵌的“开关”来实现自身形状或运动方式的改变,从而实现特定功能或适应特殊工况。例如,捕蝇草感应外界环境而诱导叶面失稳完成对昆虫的捕捉,含羞草通过感应外界激励将叶片进行快速的闭合实现主动的保护。与此相比,传统材料尽管支撑了人类文明几千年的发展,但性能参数仍然是刚度和强度等被动的力学性能,不具有多模态和多路径的变形能力,也难以进行适时自主调整。
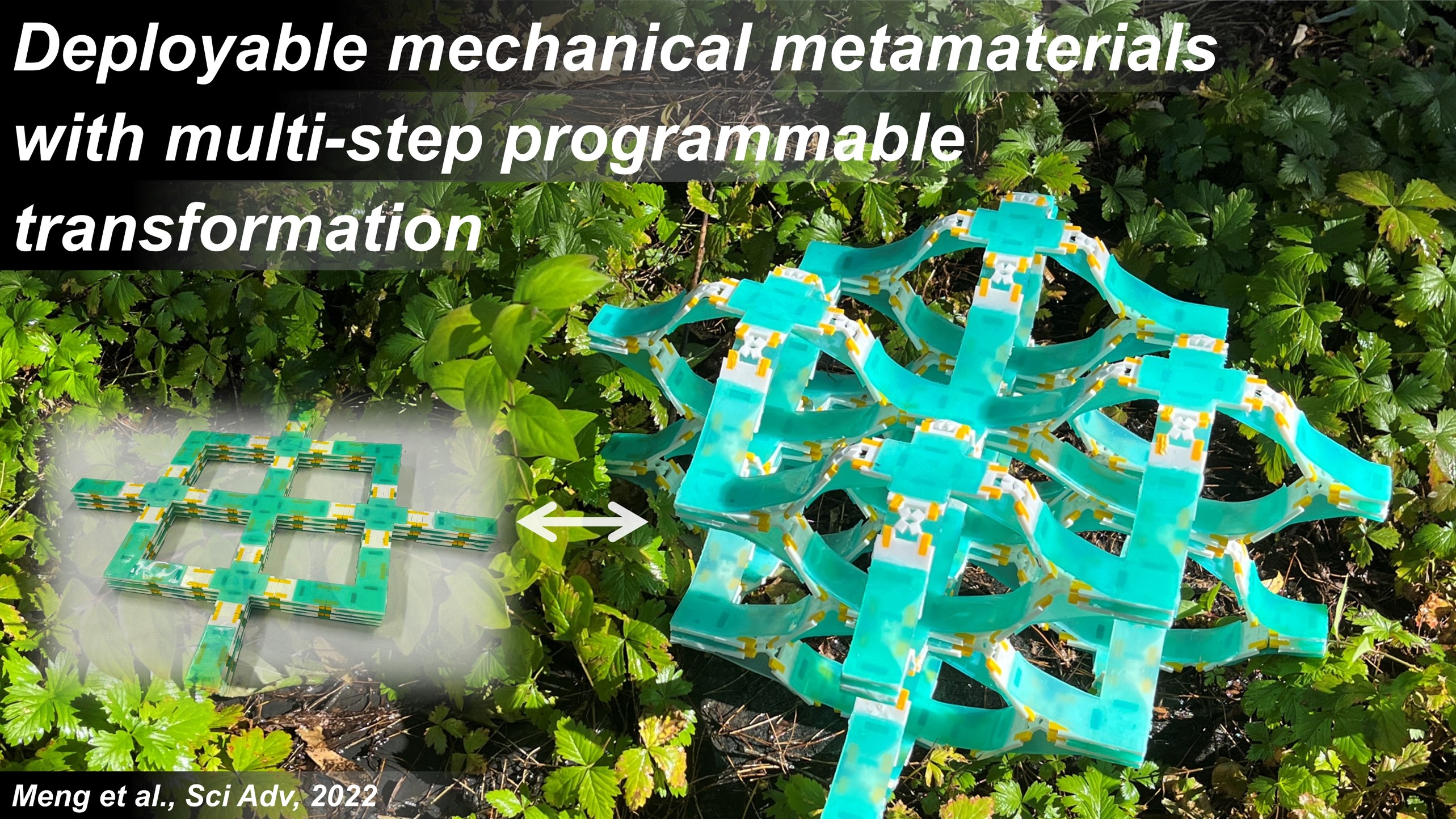
图1. 多模态和多路径变形的可折展力学超材料
最近,9999js金沙老品牌陈常青教授课题组提出了一个基于“铰-杆”模型的通用设计框架,实现了具有多模态、多路径变形能力的力学超材料。利用外界激励(如力、热、光、电、磁等)所诱导产生变形的临界阈值不同,使力学超材料实现了多步的顺序变形,从理论上证明了n步变形的可行性。并以双稳态自折叠单元作为折叠铰,通过改变尺寸来调控突跳阈值,进而构建具有不同变形模态的基本单元(力学超材料元胞),实现了从一维到二维和从二维到三维的多步、多模态变形的可折展力学超材料(图2)。
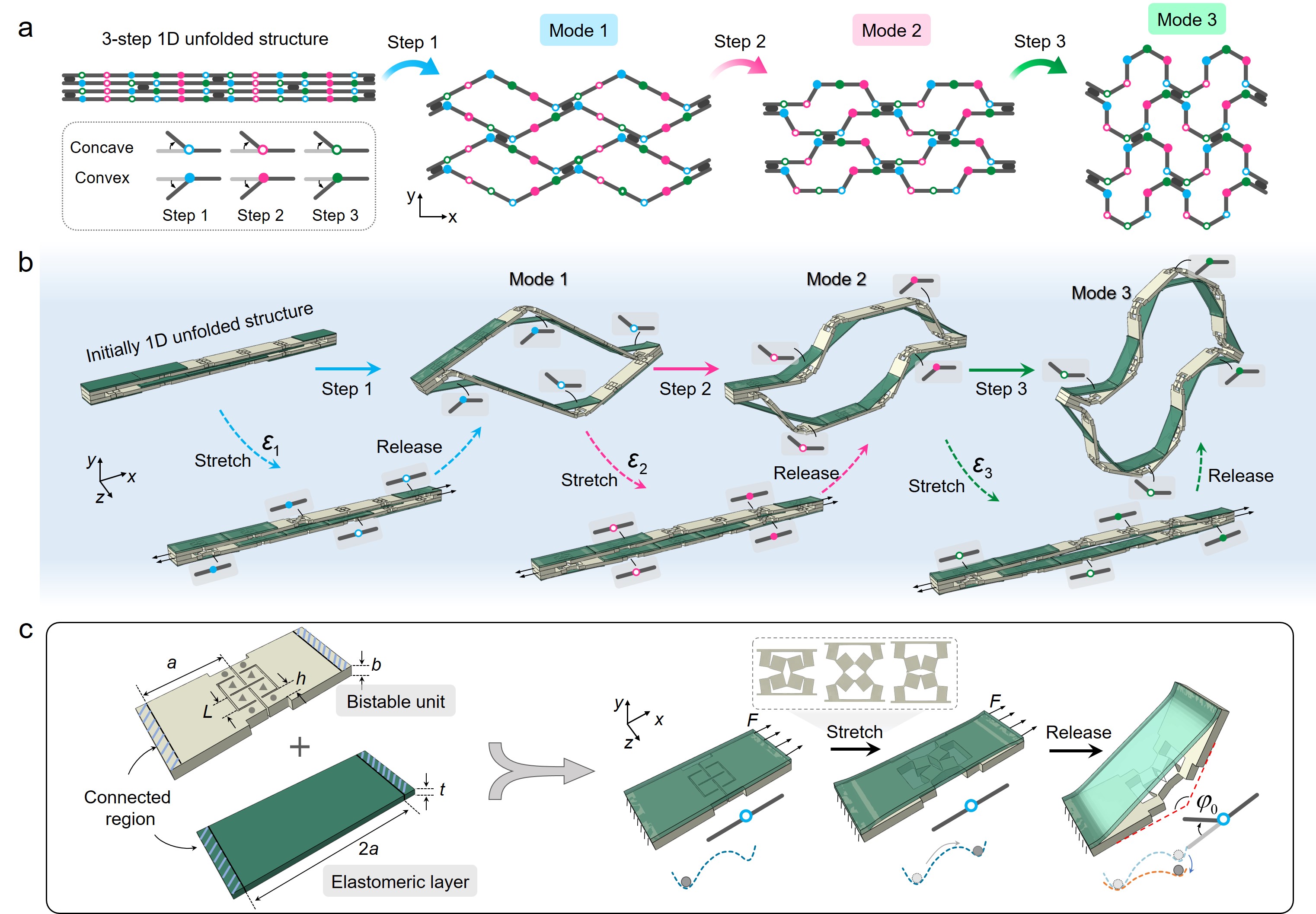
图2. 多步多模态力学超材料设计思想。(a)基于“铰-杆”模型的通用设计框架;(b)基于自折叠单元的三步变形元胞;(c)基于剪纸的自折叠单元
课题组还采用双材料增材制造技术(3D打印),实现了具有可调双稳态性质的自折叠单元,克服了可展力学超材料在实际应用中不可恢复和无法重编程的难题,使其具备温度诱导的可恢复变形能力和不同变形路径间相互转换的能力,丰富了可展力学超材料变形模态的设计空间(图3)。此外,基于该力学超材料多模态和快速可展特性,展示了在可调低频减震器和主动缓冲类机器人材料中的潜在应用。上述力学超材料还有望应用于毫米级血管支架、多模态可重构超材料、自折叠自组装机器人、空间可展结构、可变形建筑等领域(图4)。
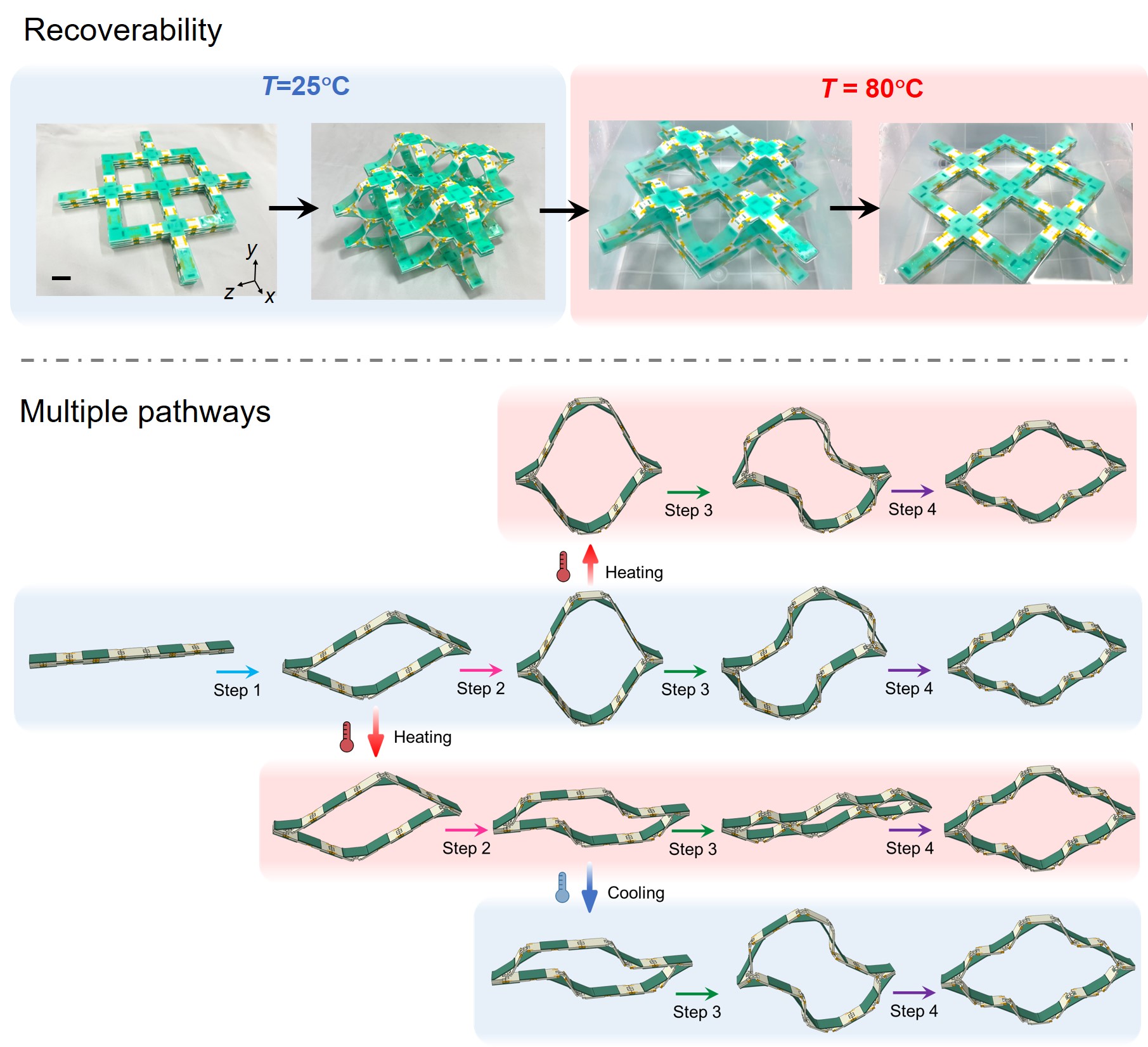
图3. 温度诱导的可恢复变形和多路径变形
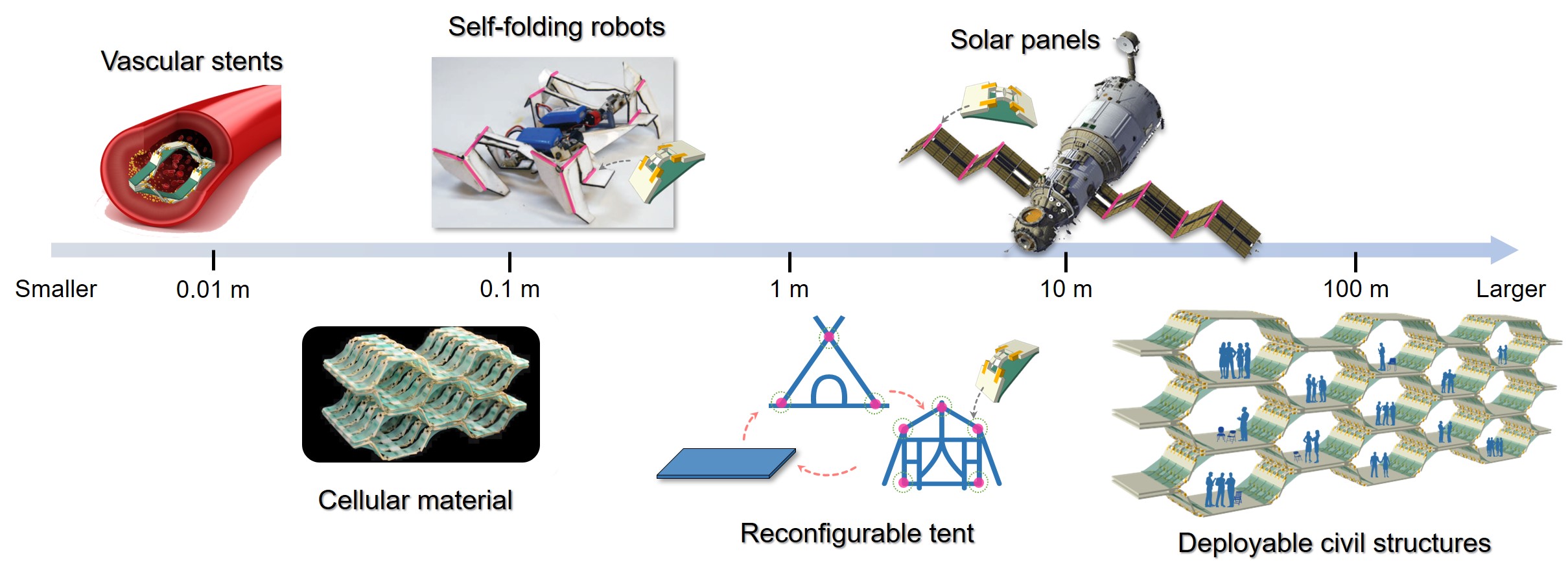
图4.多模态、多变形路径力学超材料在不同尺度的潜在应用
相关研究成果以“具有多路径变形能力的可展力学超材料”(Deployable mechanical metamaterials with multi-step programmable transformation)为题,近日在《科学·进展》(Science Advances)发表,展示出超材料具有突破传统力学性能的多模态、多路径的主动变形能力。
9999js金沙老品牌陈常青教授为论文通讯作者,2019级博士生孟志强为第一作者。作者还包括刘明超博士(现为新加坡南洋理工大学博士后)、2018级钱学森力学班本科生颜湖杰,以及合作者美国华盛顿大学盖伊·杰宁(Guy M.Genin)教授。该研究得到了国家自然科学基金委支持。近年来,陈常青课题组在力学超材料领域取得了一系列成果,包括拓扑静态孤子、多步变形、非线性拓扑边界态和机械计算等。
论文连接:
https://science.org/doi/10.1126/sciadv.abn5460

